SISTEME DE ACTIONARE PNEUMATICE – MOTOARE HIDRO-PNEUMATICE
Sursa: Actionari Hidraulice si Pneumatice – Editura Universitara Bucuresti – Autor: Mihai Avram
Motoare hidro-pneumatice
Multe aplicaţii industriale cer ca sarcina antrenată în mişcarea de translaţie sau rotaţie să fie poziţionată cu precizie ridicată în diferite puncte ale cursei de lucru. O asemenea aplicaţie este specifică în primul rând roboţilor industriali pentru antrenarea fiecărui grad de mobilitate. Obţinerea unei poziţionări precise este dependentă în primul rând de posibilitatea de a controla viteza de deplasare a sarcinii, cunoscut fiind faptul că pentru o oprire precisă viteza în apropierea punctului de oprire trebuie să aibă valori mici.
Sistemele de acţionare pneumatice, deşi foarte răspândite în tehnică, au un domeniu de aplicabilitate limitat, aceasta datorită dificultăţii realizării unui control riguros al puterii pneumatice. Un control precis al debitului şi implicit al vitezei sarcinii antrenate nu este posibil cu o unitate pneumatică. Lărgirea ariei de utilizare a acestui tip de acţionare este posibilă prin introducerea în structura sistemului de acţionare a unor circuite hidraulice de control. Se ajunge astfel la o aşa numită acţionare hidro-pneumatică. In figura 4.79 este prezentată o unitate de acţionare de acest tip. Pentru controlul mişcării cilindrului pneumatic se foloseşte un cilindru hidraulic.
 Fig. 4.79
Fig. 4.79
Circuitul de alimentare a cilindrului hidraulic este separat de circuitul de alimentare a celui pneumatic. Cei doi cilindri pot fi separaţi (caz în care pot fi tipizaţi) sau fabricaţi într-un bloc comun cu toate circuitele necesare. Cilindrul hidraulic CH are orificiile de admisie legate între ele; în derivaţie cu acest circuit este montat un mic rezervor de ulei Rc care are rolul de a compensa variaţiile de volum datorate pe de o parte prezenţei tijei numai în una dintre camerele active ale motorului, iar pe de altă parte dilatărilor sau contracţiilor termice ale fluidului. Singura condiţie ce trebuie impusă cilindrului hidraulic este aceea de a avea o cursă cel puţin egală cu cea a cilindrului pneumatic. Dacă este necesar el poate avea un diametru mai mic decât cel pneumatic. Funcţionarea cilindrului hidraulic este identică cu aceea a unui amortizor cu ulei care are rolul de a frâna mişcarea cilindrului pneumatic. O reglare a vitezei poate fi făcută introducând în circuitul hidraulic două drosele de cale, câte unul pentru fiecare sens de deplasare. Astfel se poate obţine pentru fiecare sens de deplasare viteza dorită.
Din punct de vedere constructiv unităţile pneumo-hidraulice se pot diferenţia prin modul de cuplare a cilindrilor. Sub acest aspect există două variante de asemenea unităţi:
• unităţi obţinute prin cuplarea în paralel a cilindrilor (fig.4.80);
• unităţi obţinute prin înserierea cilindrilor (fig.4.81).
Posibilităţile de cuplare a cilindrilor în paralel sunt prezentate în figura 4.80. O asemenea construcţie presupune fixarea tijelor cilindrilor în condiţii tehnice de precizie riguroase, astfel încât paralelismul lor să se conserve pe toată cursa de lucru. În caz contrar este posibilă apariţia unor forţe de frecare mari în bucşele de ghidare ale cilindrilor, sau chiar blocarea ansamblului mobil pe cursă. Soluţia din figura 4.80 a are avantajele ce decurg din utilizarea numai a doi cilindri (mai ieftină, gabarit mai mic etc.) dar prezintă ca dezavantaj faptul că forţa utilă dezvoltată Ft este mai mică. Soluţia din figura 4.80 b este folosită atunci când se doreşte dezvoltarea unor forţe utile mari (comparativ cu soluţia precedentă, valoarea forţei utile se dublează) în condiţiile utilizării unor cilindri pneumatici cu pistoane de acelaşi diametru. Totodată, la această soluţie, ghidajele unităţii sunt încărcate simetric. Totuşi, la această variantă apare o condiţie nouă, cea a acţionării simultane a celor doi cilindri pneumatici, rezolvabilă prin alimentarea concomitentă a lor şi prin realizarea unor circuite de alimentare identice.
Varianta funcţională ideală de acţionare este realizată atunci când forţa rezultantă îşi menţine direcţia de acţionare pe toată cursa de lucru a cilindrilor, în orice regim de mişcare. O astfel de posibilitate o oferă unităţile pneumo-hidraulice la care cei doi cilindri sunt coaxiali (fig.4.81). în figura 4.81 a apar condiţii tehnice deosebite legate în special de necesitatea realizării coaxialităţii între axele celor doi cilindri şi a etanşeităţii camerelor de lucru ale celor doi cilindri. Din acest motiv trebuie impuse condiţii severe în ceea ce priveşte concentricitatea suprafeţelor etanşate, precum şi abaterile acestora de la forma cilindrică. în figura 4.81 b este prezentată o soluţie asemănătoare celei anterioare. Deosebirea constă în aceea că aici cilindrul hidraulic are tijă bilaterală, ceea ce conduce la creşterea gabaritului (se dublează cursa), însă se obţin simplificări structurale ale circuitului hidraulic de comandă. În acest sens trebuie subliniat încă o dată că în toate cazurile în care cilindrul hidraulic are tijă unilaterală, la deplasarea pistonului spre camera fără tijă volumul de ulei dislocat nu poate ocupa volumul camerei fără tijă, deoarece acesta este mai mic cu valoarea volumului ocupat de tijă. Deci în structura circuitului hidraulic trebuie să apară un element de compensare EC (fig.4.82), cu un rol de acumulare şi apoi de livrare a diferenţei de volum. În figura 4.82 sunt arătate două modalităţi de amplasare a elementului de compensare în circuitul hidraulic. Totodată sunt prevăzute şi elementele necesare controlului vitezelor.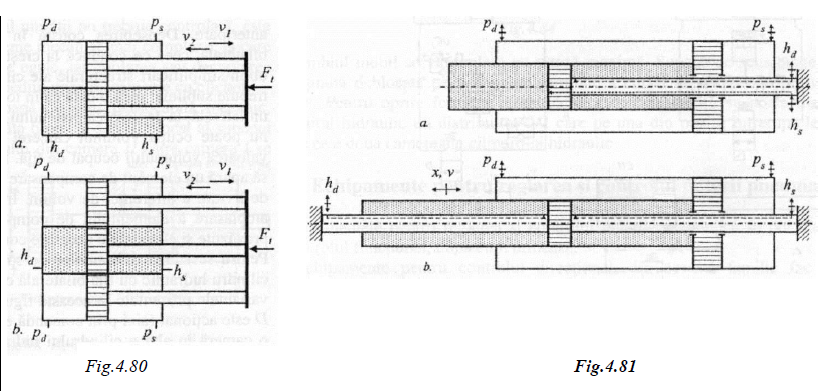
Pentru sesizarea diferenţelor de structură, în figura 4.82 c este reprezentat un cilindru hidraulic cu tijă bilaterală care are aceeaşi capacitate de reglare. în toate variantele prezentate în această figură viteza rapidă se obţine când distribuitorul D este acţionat (aici prin comandă electromagnetică) şi circulaţia uleiului dintr-o cameră în alta a cilindrului hidraulic CH se face pe un circuit cu rezistenţă hidraulică minimă. In regim de viteze lente circulaţia prin distribuitor este întreruptă, ansamblul de drosele de cale reglează vitezele lente, în sensul de deplasare spre dreapta prin droselul de cale DCj, iar în sensul de revenire prin droselul de cale DC2. Sunt necesare două drosele de cale pentru obţinerea independenţei de reglare a vitezelor lente pe fiecare sens de mişcare. La soluţia prezentată în figura 4.82 c, unde camerele de lucru ale cilindrului ]hidraulic sunt echivalente, controlul vitezelor se poate realiza cu un drosel simplu – droselul Dr. Rămâne însă dezavantajul gabaritului mare, adeseori inacceptabil. La aplicaţiile la care deplasarea pe un sens nu trebuie controlată, pistonul hidraulic este prevăzut cu o supapă de sens unic.
 Fig.4.82
Fig.4.82
Un asemenea sistem, la care mişcarea către stânga a ansamblului mobil al unităţii nu trebuie controlată, este prezentat în figura 4.83. Se pot folosi şi sisteme mecanice mai complexe, la care cilindri pneumatici şi cei hidraulici au curse egale, iar cuplarea sau decuplarea lor se face atunci când se doreşte, prin intermediul unor mecanisme cu clichet.
 Fig.4.83
Fig.4.83
Acelaşi lucru se poate obţine şi cu o supapă de sens deblocabilă mecanic, montată în paralel cu droselul (fig.4.84). Atâta timp cât sensul blocat al supapei de sens A nu este deblocat, curgerea lichidului din camera II către camera I se realizează prin secţiunea controlată de droselul B, deci mişcarea de avans a unităţii se realizează cu viteza reglată prin droselul B. Atunci când supapa de sens A este acţionată mecanic de către tijă se realizează deblocarea sensului blocat al supapei, iar curgerea uleiului din camera 77 către camera I se realizează prin supapă, deoarece aceasta este secţiunea de minimă rezistenţă.
 Fig.4.84
Fig.4.84
În consecinţă ansamblul mobil se va deplasa cu viteză maximă. Supapa de sens poate să fie menţinută deblocată pe o anumită porţiune a cursei de avans sau pe întreaga cursă. Pentru oprire fermă a ansamblului mobil al unităţii se poate monta în circuitul hidraulic un distribuitor 2/2 care pe una din poziţii întrerupe legătura între cele două camere ale cilindrului hidraulic.
Autor: Prof. Dr. Ing. Mihai Avram
Articole relationate:
SISTEME DE ACTIONARE PNEUMATICE – INTRODUCERE
SISTEME DE ACTIONARE PNEUMATICE – GENERATOARE DE ENERGIE PNEUMATICA
SISTEME DE ACTIONARE PNEUMATICE – TIPURI DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – RETELE DE DISTRIBUTIE A AERULUI COMPRIMAT
SISTEME DE ACTIONARE PNEUMATICE – USCATOARELE DE AER
SISTEME DE ACTIONARE PNEUMATICE – FILTRAREA IN STATIILE DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – REGLAREA DEBITULUI UNUI COMPRESOR
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – FILTRUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – UNGATORUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – REGULATORUL
SISTEME DE ACTIONARE PNEUMATICE – DISPOZITIVE DE ALIMENTARE PROGRESIVA
SISTEME DE ACTIONARE PNEUMATICE – STRUCTURI DE GRUPURI DE PREPARARE AER
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE OSCILANTE
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL PNEUMATIC CU SERTAR
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL CU SUPAPA
Alte articole:
TOTUL DESPRE DISTRIBUITOARE – INTRODUCERE
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 2/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 3/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 4/2 SI 4/3
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/3
TOTUL DESPRE DISTRIBUITOARE – COMENZILE DISTRIBUITOARELOR
TOTUL DESPRE DISTRIBUITOARE – ELECTRODISTRIBUITOARELE
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – DIMENSIONAREA CILINDRILOR PNEUMATICI
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – CILINDRII PNEUMATICI
Introducere in pneumatica – partea 1
Introducere in pneumatica -partea 2
Link-uri utile:
Cilindru patrat standard SI ISO15552 (original ISO6431)
Cilindrii pneumatici rotunzi ISO6432 seria MI
Cilindri pneumatici compacti ACQ
Amortizoare de soc seria ACA reglabile
Cilindri patrati ISO6431-ISO15552 seria SE
Distribuitoare actionate pneumatic 5/2 5/3 Seria 4A200
Distribuitoare pneumatice comanda electrica 3/2 seria 3V200