SISTEME DE ACTIONARE PNEUMATICE – INTRODUCERE
Sistemele de acţionare pneumatice sunt preferate într-un număr mare de aplicaţii industriale, din cele mai diverse sectoare, datorită unor calităţi incontestabile cum sunt: robusteţea, simplitatea constructivă, productivitatea, fiabilitatea ridicată şi nu în ultimul rând preţul de cost mai scăzut. În general, asemenea sisteme sunt folosite atunci când:
■ trebuie controlate forţe şi momente de valori medii;
■ viteza de deplasare a sarcinii nu trebuie să respecte cu stricteţe o anumită lege;
■ poziţionarea sarcinii nu trebuie făcută cu precizie ridicată;
■ condiţiile de funcţionare sunt severe (există pericol de explozie, incendiu, umiditate etc);
■ trebuie respectate cu stricteţe o serie de norme igienico – sanitare (în industria alimentară, farmaceutică, tehnică dentară).
Figura 4.1 pune în evidenţă locul sistemelor de acţionare pneumatice în raport cu celelalte tipuri de sisteme de acţionare prin prisma forţei controlate şi a preţului de cost. Trebuie subliniat faptul că în timp ce în unele domenii sistemele pneumatice de acţionare intră în competiţie cu celelalte sisteme (electrice, hidraulice, mecanice), în anumite aplicaţii ele se utilizează aproape în exclusivitate, fiind de neînlocuit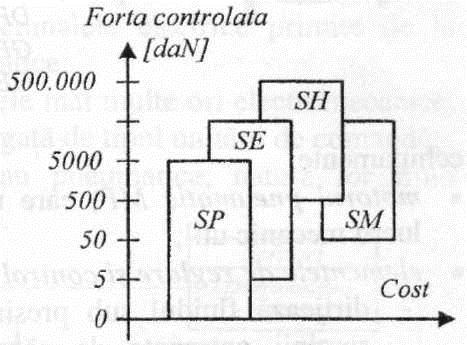
LEGENDA:
SP – sisteme pneumatice
SE – sisteme electrice
SH – sisteme hidraulice
SM – sisteme mecanice
Fig.4.1
Structura unui sistem pneumatic de acţionare
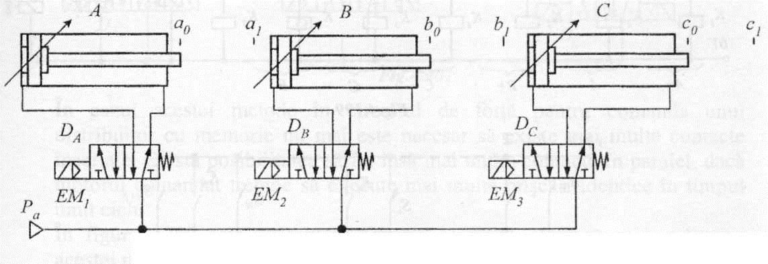
În figura 4.2 este prezentat, spre exemplificare, un sistem de acţionare pneumatic. Acest sistem, un sistem simplu, are în componenţa sa următoarele echipamente:
• motorul pneumatic MP, care transformă energia pneumatică de intrare în lucru mecanic util;
• elementele de reglare şi control ERC, care îndeplinesc următoarele funcţii:
– dirijează fluidul sub presiune, controlând astfel sensul de mişcare al sarcinii antrenate de către motor şi oprirea acesteia (distribuitorul pneumatic DP);
– reglează debitul la valoarea cerută de motor şi prin aceasta viteza de mişcare a sarcinii (droselele de cale D1 şi DC2);
– reglează presiunea în sistem, în corespondenţă cu sarcina antrenată;
• generatorul de energie GE, care generează energia pneumatică necesară sistemului; în practică pot fi întâlnite două situaţii:
– când se dispune de o reţea de aer comprimat, caz în care energia necesară este preluată de la această reţea prin simpla cuplare a sistemului la unul din posturile de lucru ale reţelei;
– când nu se dispune de reţea de aer comprimat, situaţie în care trebuie apelat la un compresor, ca în exemplul din figura 4.2;
În practică există o mare diversitate de sisteme de acţionare pneumatice. Totuşi se poate vorbi de o structură comună (fig.4.3) care pe lângă echipamentele deja prezentate mai poate conţine:
• unitatea de comandă UC; la acest nivel se poate opta pentru un număr limitat de soluţii, bazate pe:
dispozitive electronice
– relee electromagnetice
– elemente logice pneumatice.
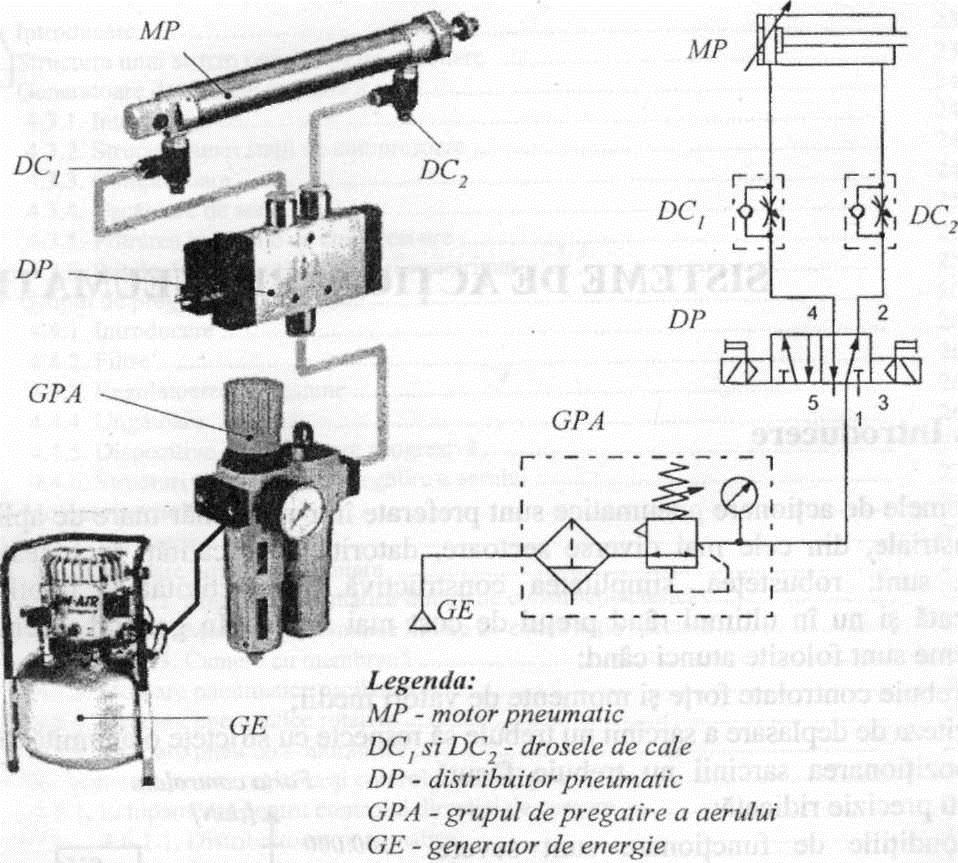 Fig.4.2
Fig.4.2
Dispozitivele electronice sunt cele care au cea mai largă utilizare. în această categorie sunt incluse atât circuitele electronice, cât şi unităţile programabile. Foarte răspândite astăzi sunt PLC – urile (“control logic programabil”), dar se constată o tendinţă de utilizare tot mai mult a calculatoarelor personale pentru control. Releele electromagnetice reprezintă un mijloc tradiţional pentru construcţia circuitului cablat de control, chiar dacă funcţia lor actuală se limitează la sisteme de acţionare relativ simple şi la operaţii de siguranţă, care de preferinţă nu se încredinţează programelor software.
Elementele logice pneumatice se folosesc în sistemele de mici dimensiuni, când se doreşte obţinerea unor sisteme pur pneumatice din motive de ambianţă (pericol de explozie, de incendiu, umiditate etc.) sau din motive de preţ de cost.
• elementele de interfaţă I au rolul de a transforma semnalele de putere joasă, de natură electrică sau pneumatică, furnizate de unitatea centrală, în semnale de putere înaltă, de regulă de altă natură; exemplul cel mai sugestiv îl constituie electrovalva care transformă semnalele electrice primite de la unitatea de comandă UC în semnale pneumatice;
• senzorii şi limitatoarele de cursă sunt de cele mai multe ori electromecanice, dar pot fi şi pneumatice; alegerea lor este legată de tipul unităţii de comandă;
• elementele de intrare pot fi electrice sau pneumatice, natura lor fiind dependentă tot de tipul unităţii de comandă.
O primă clasificare a sistemelor pneumatice de acţionare se poate face după modul de operare a sistemului în:
– sisteme proporţionale sau analogice
– sisteme digitale.
 Fig.4.3
Fig.4.3
Sistemele proporţionale au specific faptul că mărimea de ieşire este determinată de nivelul semnalului de intrare (impropriu se spune că această dependenţă este proporţională). De exemplu, în cazul unui sistem care controlează forţa, pentru o anumită valoare a mărimii de intrare, presiunea din sistem are un anumit nivel, căruia îi corespunde o anumită forţă. Orice variaţie a presiunii determină modificarea forţei.
Un asemenea sistem este sensibil la perturbaţii externe. Aceste perturbaţii fac ca semnalul de comandă să varieze accidental în jurul unei valori medii, riscul constând în interpretarea perturbaţiei ca o modificare a semnalului de comandă, ceea ce va determina modificarea mărimii de ieşire din sistem. Mai sigure din acest punct de vedere sunt sistemele digitale. într-un asemenea sistem contează numai nivelele discrete ale semnalelor. De cele mai multe ori se lucrează cu două nivele ale semnalului, prezenţa sau absenţa semnalului, semnale “on – off’, sau semnale “totul sau nimic”. Din punct de vedere al logicii algebrice existenţa semnalului este echivalentă cu “i”, iar absenţa semnalului cu “0”, Pentru o mai bună înţelegere se consideră un distribuitor pneumatic clasic, comandat pneumatic (fig.4.4). Se va urmări variaţia semnalului de ieşire(presiunii PA) în funcţie de mărimea de intrare – presiunea de comandă pc.
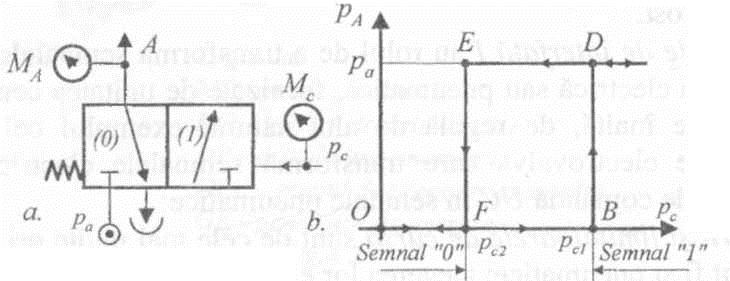 Fig.4.4
Fig.4.4
Atunci când presiunea de comandă pc este nulă, presiunea la orificiul de consumator A al distribuitorului, măsurată cu manometrul MA, este de asemenea nulă (punctul O din fig.4.4); distribuitorul materializează câmpul (0). Crescând presiunea pc manometrul MA indică o presiune nulă până când presiunea de comandă reuşeşte să învingă forţa rezistentă datorată arcului şi frecările interne; acest lucru se întâmplă când presiunea de comandă atinge valoarea pc1 (punctul B de pe grafic). În acest moment distribuitorul comută, materializează poziţia (1), iar la orificiul de ieşire A se măsoară presiunea pa (punctul D de pe grafic). Creşterea ulterioară a presiunii de comandă nu modifică presiunea de ieşire. Reducând acum presiunea de comandă, presiunea de la ieşire rămâne la valoarea pa până ce presiunea de comandă devine pa (punctul E de pe grafic); se observă că datorită frecărilor (fenomenului de histerezis) se depăşeşte punctul D. În punctul E se realizează comutarea şi presiunea de ieşire devine zero (se trece în punctul F). Reducerea în continuare a presiunii de comandă face să se parcurgă traseul de la F la O fără a se modifica presiunea PA. Diagrama din figura 4.4 b pune în evidenţă două presiuni diferite de comutare pc1 şi pC2, datorită existenţei fenomenului de histerezis. În concluzie, oricare ar fi presiunea de comandă Pc > Pcl la orificiul de ieşire al distribuitorului există presiune, deci semnalul de ieşire este “1”, în timp ce oricare ar fi presiunea de comandă Pc < Pc2 la orificiul de ieşire presiunea este zero, deci semnalul de ieşire este “0”. Între valorile pc1 şi pC2 semnalul de ieşire depinde de modul în care este parcurs ciclul. în ceea ce priveşte presiunea de comandă se consideră pc = 1 dacă Pc > Pc1 şi pc = 0 dacă Pc < Pc2. În intervalul [Pc2, Pc1] presiunea de comandă nu este definită.
Echipamentele pneumatice dintr-un sistem pneumatic de acţionare pot funcţiona la presiuni de lucru diferite. Cele ce sunt conectate direct cu motorul (distribuitoarele, supapele de sens, droselele, supapele de presiune) uzual lucrează la presiuni de 8 … 10 [bar]. Dacă echipamentul are numai rolul de a genera semnale logice, fără a interveni în fluxul principal de putere, presiunea de lucru poate fi redusă. Din această categorie fac parte atât elementele logice pneumatice, care pot să lucreze la presiuni de 3 … 4 [bar], cât şi elementele micropneumatice cu membrană care lucrează la presiuni de 1,4 … 2,5 [bar]. în sfârşit, pentru funcţii speciale se poate apela la elementele logice fluidice care au presiuni de lucru de 0,1 … 1 [bar].
Echipamentele pneumatice se pot împărţi în echipamente active şi echipamente pasive, după modul de obţinere a semnalului de ieşire.
Sunt active acele echipamente la care semnalul de ieşire provine de la o sursă de presiune constantă. în acest caz semnalul de comandă are numai rolul de pilotare. Aceste echipamente pot avea la ieşire semnale mai mari decât cele de comandă. Se realizează astfel o regenerare a semnalului şi chiar o amplificare a acestuia graţie energiei furnizate de sursa de presiune constantă. Echipamentele pasive au specific faptul că semnalele de ieşire se obţin direct dintr-un semnal de intrare. Aceste echipamente nu necesită o legătură suplimentară cu sursa de energie, dar semnalul de ieşire nu numai că nu este amplificat, dar are un nivel energetic mai scăzut, datorită pierderilor de presiune şi debit care apar în urma curgerii prin echipament.
Autor: Prof. Dr. Ing. Mihai Avram
Alte articole:
TOTUL DESPRE DISTRIBUITOARE – INTRODUCERE
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 2/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 3/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 4/2 SI 4/3
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/3
TOTUL DESPRE DISTRIBUITOARE – COMENZILE DISTRIBUITOARELOR
TOTUL DESPRE DISTRIBUITOARE – ELECTRODISTRIBUITOARELE
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – DIMENSIONAREA CILINDRILOR PNEUMATICI
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – CILINDRII PNEUMATICI
Introducere in pneumatica – partea 1
Introducere in pneumatica -partea 2
Link-uri utile:
Cilindru patrat standard SI ISO15552 (original ISO6431)
Cilindrii pneumatici rotunzi ISO6432 seria MI
Cilindri pneumatici compacti ACQ
Amortizoare de soc seria ACA reglabile
Cilindri patrati ISO6431-ISO15552 seria SE
Distribuitoare actionate pneumatic 5/2 5/3 Seria 4A200