CAPITOLUL 4 – MOTOARE PNEUMATICE – PNEUMO-HIDRAULICE
Motoare pneumo – hidraulice
Consideraţii generale
Este cunoscut faptul că datorită mediului de lucru folosit sistemele de acţionare pneumatice nu pot controla cu precizie viteza sarcinii antrenate. Din acest motiv nici o poziţionare cu precizie ridicată în diferite puncte ale cursei de lucru nu este posibilă. Altfel spus, un control riguros al debitului şi implicit al vitezei sarcinii antrenate nu este posibil cu o unitate pneumatică.
Lărgirea ariei de utilizare a acestui tip de acţionare este posibilă prin utilizarea în structura sistemului de acţionare a unor circuite hidraulice de control. Se obţine astfel un sistem mixt, la care acţionarea propriu-zisă este pneumatică, iar controlul vitezei se realizează printr-un circuit hidraulic. Aceste sisteme sunt cunoscute sub denumirea de motoare pneumo-hidraulice.
Prezentarea structurii
În figura 49 este prezentată schema funcţională a unui motor de acest tip. Pentru controlul mişcării sarcinii se foloseşte un motor hidraulic liniar.
Circuitul de alimentare a motorului hidraulic este separat de circuitul de alimentare a celui pneumatic. Cele două motoare pot fi separate (caz în care pot fi tipizate) sau fabricate într-un bloc comun cu toate circuitele necesare.
 Figura 49
Figura 49
Pentru controlul mişcării motorului pneumatic MP se foloseşte un circuit hidraulic de reglare CHR format din motorul hidraulic MH, droselele de cale DC1 şi DC2 şi elementul de compensare EC.
Singura condiţie ce trebuie impusă motorului hidraulic este aceea de a avea o cursă cel puţin egală cu cea a motorului pneumatic. Dacă este necesar el poate avea un diametru mai mic decât cel pneumatic.
Elementul de compensare EC, un mic rezervor de ulei, are rolul de a compensa variaţiile de volum datorate pe de o parte prezenţei tijei numai în una dintre camerele active ale motorului, iar pe de altă parte dilatărilor sau contracţiilor termice ale fluidului.
Reglarea celor două viteze v1 şi v2, este posibilă numai dacă distribuitorul D integrat în circuitul hidraulic de control este necomandat (se află în poziţia preferenţială). În această situaţie reglarea vitezei v1 se realizează cu ajutorul droselului de cale DC1, iar reglarea vitezei v2 cu ajutorul droselului de cale DC2.
Când distribuitorul D este comandat circulaţia uleiului dintr-o cameră în alta a motorului hidraulic MH se face pe un circuit cu rezistenţă hidraulică minimă. În aceste condiţii viteza ansamblului mobil este maximă.
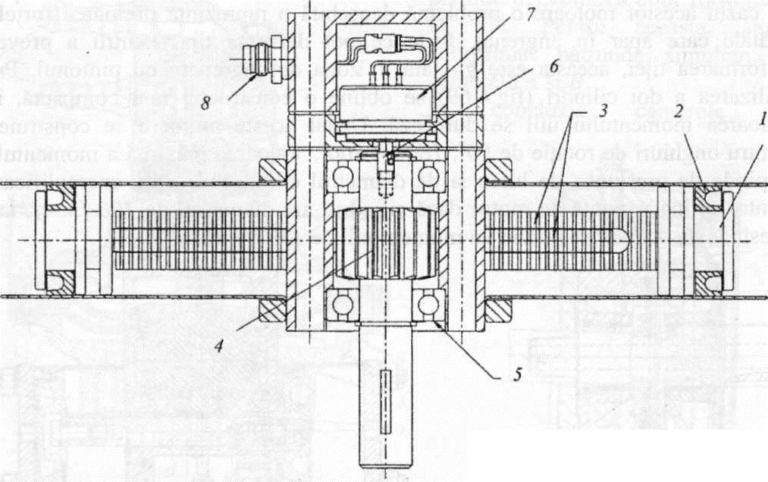
Din punct de vedere constructiv motoarele pneumo-hidraulice se pot diferenţia prin modul de cuplare a cilindrilor. Din acest punct de vedere există două variante:
- motoare cu cilindri montaţi în serie (figura 49);
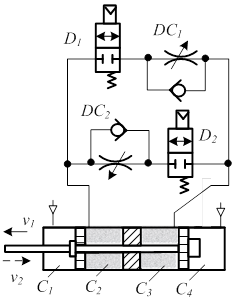
- motoare cu cilindri montaţi în paralel (figura 50).
 Figura 50
Figura 50
În cazul ultimei variante, pentru a vehicula volume egale de ulei indiferent de sensul de mişcare, camerele C2 şi C3 sunt incluse în circuitul hidraulic. Camerele C1 şi C4 sunt folosite pentru acţionarea propriu-zisă, o acţionare pneumatică.
În funcţie de comenzile celor două distribuitoare D1 şi D2 se pot obţine următoarele regimuri de funcţionare:
- ansamblu mobil blocat – cele două distribuitoare D1 şi D2 nu sunt acţionate;
- deplasare cu viteză v1 reglabilă – distribuitorul D1 acţionat şi distribuitorul D2 neacţionat;
- deplasare cu viteză v2 reglabilă – distribuitorul D2 acţionat şi distribuitorul D1 neacţionat;
- deplasare cu viteză v1 maximă – distribuitorul D2 acţionat;
- deplasare cu viteză v2 maximă – distribuitorul D1 acţionat.
Pe acelaşi principiu sunt realizate şi motoare oscilante. În figura 51 este prezentată schema funcţională a unui asemenea motor. Aici, mişcarea de translaţie alternativă a motorului pneumo-hidraulic liniar MPHL este transformată în mişcare de rotaţie alternativă printr-un mecanism pinion – cremalieră.
Cele două viteze w1 şi w2 pot fi reglate la valoarea dorită prin intermediul droselelor de cale Dc1, respectiv Dc2.
 Figura 51
Figura 51
În circuitul hidraulic sunt integrate şi două supape de sens unic, comandate pneumatic, deblocabile S1 şi S2.
În absenţa semnalelor de comandă x1 şi x2 cele două supape sunt închise şi circuitul hidraulic este blocat, cea ce permite oprirea sarcinii antrenate în orice punct de pe cursa de lucru şi conservarea poziţiei acesteia.
Prof. Dr. Ing. Mihai Avram