SISTEME DE ACTIONARE ELECTRO-PNEUMATICE – ACTIONATE CU RELEE
Mult timp pentru automatizarea proceselor industriale comanda cu relee a constituit principala soluţie. După apariţia şi dezvoltarea explozivă a sistemelor cu microprocesor (anii 70 – 80) tehnica automatizării cu relee a pierdut din importanţă, dar nu a dispărut complet.
Principalele avantaje ale sistemelor de acţionare realizate cu relee sunt:
– preţul acestor sisteme, mult mai mic comparativ cu cel al sistemelor de acţionare realizate cu microprocesor de uz industrial;
– întreţinerea şi repararea acestor sisteme se poate face de către un personal cu o pregătire medie, fără o specializare aparte;
– costurile de întreţinere sunt în general mai mici.
În concluzie, în cazul automatizării unor procese mai puţin complexe (numărul de motoare din sistem este mic) sistemele de acţionare realizate cu relee sunt preferate.
În cazul acestor sisteme după realizarea diagramei funcţionale (paragraful 4.8.1) se trece la realizarea schemei funcţionale a sistemului precum şi a schemei electrice. Schema funcţională nu diferă de cele prezentate în paragraful 4.8.2 decât prin faptul că aici apar distribuitoare comandate electric, iar senzorii folosiţi sunt senzori care furnizează la ieşire semnale electrice. Schema electrică conţine simbolurile echipamentelor specifice subsistemului de comandă electric prezentate în paragrafele 4.7.7, 4.7.8, 4.7.9 şi 4.7.10, precum şi bobinele distribuitoarelor din sistem. Schema pune totodată în evidenţă modul de conectare a acestor echipamente.
Dezavantajul principal al utilizării releelor constă în dificultatea de proiectare a schemei electrice.
În cele ce urmează sunt prezentate câteva exemple de asemenea sisteme, şi anume:
• Sisteme de acţionare cu un motor
a. motor cu simplă acţiune; pentru un asemenea sistem schema funcţională este prezentată în figura 4.191 a; în ceea ce priveşte schema electrică aceasta poate fi concepută în trei variante:
– cu acţionare directă – figura 4.191 c; în acest caz la apăsarea butonului B electromagnetul EM1 va fi alimentat, distribuitorul DA va realiza câmpul de distribuţie (1), iar ansamblul mobil al motorului A va avansa; când butonul va fi lăsat liber se va realiza revenirea în poziţia din figură;
– cu acţionare indirectă – figura 4.191 d; în acest caz în circuitul electric este utilizat releul de comutaţie K1; la apăsarea butonului B bobina releului K1 este alimentată, acesta comută şi realizează alimentarea electromagnetul EM1, distribuitorul DA va realiza câmpul de distribuţie (1), iar ansamblul mobil al motorului A va avansa; dezactivarea butonul B determină dezactivarea releului iar contactul K; al acestuia deschide circuitul de alimentare al electromagnetului, ceea ce are drept consecinţă revenirea distribuitorului în poziţia preferenţială şi deci retragerea ansamblului mobil al motorului A;
– cu acţionare indirectă cu autmenţinere – figura 4.191 e; la apăsarea butonului B circuitul de alimentare al releului se închide şi acesta comută; aceasta determină închiderea întrerupătoarelor K1 aflate în liniile de curent 2 şi 3; după apăsare butonul B poate fi eliberat imediat, deoarece alimentarea releului se face prin calea de curent paralelă 2, a cărei închidere o comandă chiar releul; deci releul îşi păstrează starea de activare prin automenţinere; de aici funcţionarea este identică cu cea prezentată în cazul precedent; pentru revenirea ansamblului mobil trebuie apăsat butonul B2 care va întrerupe alimentarea releului şi deci deschiderea contactelor K1.
 Fig.4.191
Fig.4.191
b. motor cu dublă acţiune deservit de un distribuitor 4/2 cu poziţie preferenţială; pentru un asemenea sistem schema funcţională este prezentată în figura 4.191 b; în ceea ce priveşte schema electrică aceasta se identifică cu una dintre variantele prezentate anterior în figura 4.191;
c. motor cu dublă acţiune deservit de un distribuitor 4/2 cu memorie; pentru un asemenea sistem schema funcţională este prezentată în figura 4.192 a; în ceea ce priveşte schema electrică aceasta poate fi concepută în trei variante; în figura 192 b este prezentată varianta cu acţionare indirectă;
d. motor cu dublă acţiune deservit de un distribuitor 4/2 cu memorie ce lucrează în ciclu dus – întors; pentru un asemenea sistem schema funcţională este prezentată în figura 4.193 a; în ceea ce priveşte schema electrică aceasta este prezentată în figura 193 b; faţă de cazul anterior aici în schema funcţională apare în plus presostatul a1; la apăsarea butonului B se alimentează linia de curent 1 care alimentează releul K1; contactul acestuia din linia 3 se închide şi electromagnetul EM1 va comuta distribuitorul DA pe poziţia din stânga; ansamblul mobil al motorului A avansează; la capăt de cursă deoarece volumul alimentat de distribuitor este fix presiunea în acest volum creşte, iar la atingerea valorii reglate prin intermediul presostatului a1 acesta furnizează la ieşirea sa un curent ce va alimenta releul K2; contactul acestuia din linia 4 se închide şi electromagnetul EM2 va comuta distribuitorul DA pe poziţia din dreapta; ansamblul mobil al motorului A se retrage;

Fig.4.192 Fig.4.193
Fig.4.193
e. motor cu dublă acţiune deservit de un distribuitor 4/2 cu memorie ce lucrează în ciclu continuu; pentru acest sistem schema funcţională este prezentată în figura 4.194 a, iar ceea electrică în figura 194 b; inversarea sensului de mişcare se realizează cu ajutorul celor doi senzori de proximitate a0 şi a1, pornirea sistemului se face prin apăsarea butonului B1 iar oprirea în urma apăsării butonului B2.
Sisteme cu două motoare
a. secvenţa de lucru: A+, B+, A- ,B-; pentru acest sistem schema funcţională este prezentată în figura 4.195 a, iar schema electrică în figura 4.195 b; diagrama funcţională şi diagrama semnale – faze au fost prezentată în figura 4.179 a; aşa cum s-a arătat în paragraful 4.8.2.3 această secvenţă de lucru nu ridică probleme deosebite (nu apar semnale blocante); din acest motiv concepţia schemei electrice se poate face cu uşurinţă;
Fig.4.194
b. secvenţa de lucru: A+, B+, B-, A-; pentru acest sistem schema funcţională se identifică cu cea a sistemul precedent (fig. 4.195 a); diagrama funcţională şi diagrama semnale – faze au fost prezentată în figura 4.179 b; ultima diagramă pune în evidenţă existenţa a două semnale blocante; din acest motiv realizarea schemei electrice nu mai este atât de simplă ca în cazul precedent; în figura 4.196 este prezentată o soluţie pentru această problemă.
Iată de ce, este necesar ca proiectantul unor sisteme de acest fel să cunoască câteva tehnici de proiectare. Acest lucru este deosebit de util mai ales în cazul sistemelor de acţionare complexe, sau în cazul sistemelor care în timpul unui ciclu pot trece de mai multe ori prin aceeaşi stare, de fiecare dată trebuind să execute alte acţiuni. Un exemplu de sistem de acest tip este cel pentru care diagrama mişcare – faze este cea din figura 4.197.
 Fig.4.195
Fig.4.195
Diagrama pune în evidenţă faptul că la începutul fazelor 1 şi 3 sistemul este în aceeaşi stare: ansamblurile celor trei motoare A, B şi C sunt retrase. O situaţie asemănătoare se observă şi la începutul fazelor 4 şi 6: ansamblurile cilindrilor A şi C retrase şi ansamblul cilindrului B avansat. În asemenea situaţii automatizarea nu mai poate ţine cont exclusiv de starea senzorilor montaţi în sistem. Practic, analizând diagrama nu se poate spune care senzor va determina avansul cilindrului A la pasul 1 şi al cilindrului B la pasul 3. Există mai multe metode de proiectare a unei automatizări secvenţiale cu relee, dintre care două sunt mai cunoscute:
■ metoda comutaţiei în cascadă;
■ metoda comutaţiei secvenţiale.
Aceste metode folosesc relee cu cel puţin trei contacte auxiliare, cu următoarele funcţii:
– unul pentru automenţinere;
– un altul pentru realizarea unei condiţii de anclanşare sau tăiere a automenţinerii pentru un alt releu;
– un al treilea în circuitul de forţă (o linia de curent ce alimentează un electromagnet).
 Fig. 4.196
Fig. 4.196 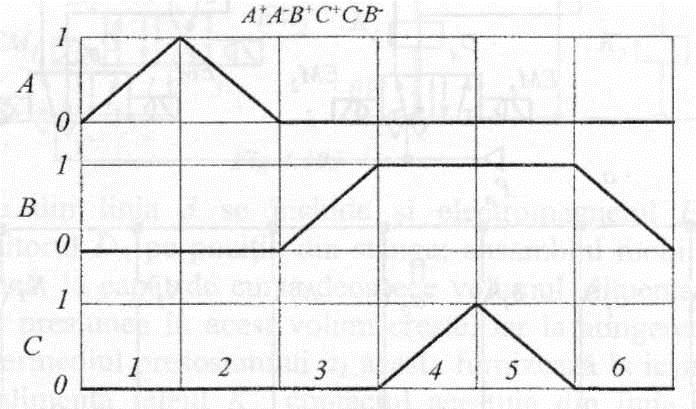
Fig. 4.197
– Metoda comutaţiei în cascadă
Metoda este indicată atunci când alimentarea motoarelor din sistem se face cu distribuitoare 5/2, cu poziţie preferenţială. Pentru exemplul considerat în figura 197 schema funcţională este cea din figura 198.
 Fig.4.198
Fig.4.198
În principiu în schema electrică vor exista n + 1 relee, unde n reprezintă numărul de paşi ai unui ciclu de lucru. La fiecare pas se activează un releu care se automenţine. Activarea releului se va realiza numai dacă sunt îndeplinite simultan două condiţii:
– un eveniment de proces: un senzor activat, o temporizare încheiată etc.
– releul anterior a fost activat.
La sfârşitul ciclului ultimul eveniment (senzor activat) va determina dezactivarea tuturor releelor, astfel încât să fie posibilă începerea unui nou ciclul. Dezactivarea releelor se va realiza tot în cascadă, fiecare releu tăind automenţinerea releului următor.
În circuitul de forţă pentru comanda unui distribuitor monostabil este posibil să fie necesare mai multe contacte ale releelor, înseriate. Unele dintre aceste contacte vor fi normal deschise şi se vor folosi la activarea electromagneţilor distribuitoarelor, altele vor fi normal închise şi se vor folosi la dezactivarea unui electromagnet activat, înainte de terminarea ciclului de funcţionare, în figura 4.199 este prezentată schema electrică a sistemului de mai sus obţinută prin folosirea metodei descrise.
O analiză atentă a acestei scheme pune în evidenţă trei structuri de circuit:
– structura de început – figura 4.200 a;
– structura de bază – figura 4.200 b;
– structura finală – figura 4.200 c.
În aceste structuri s-au făcut următoarele notaţii: Si senzorul care iniţializează faza “i”, Ki releul care comandă faza “i” şi B butonul care iniţializează ciclul de funcţionare. Pentru exemplul considerat în tabelul 4.15 este stabilită ordinea senzorilor.

Fig.4.199 
Fig.4.200
Tabelul 4.15
 – Metoda comutaţiei secvenţiale
– Metoda comutaţiei secvenţiale
Metoda presupune activarea succesivă a unui număr de relee, cu observaţia că la un moment dat numai un singur releu trebuie activat. Această metodă este indicată atunci când alimentarea motoarelor din sistem se face cu distribuitoare 5/2, cu memorie. În continuare se va arăta modul de aplicare al acestei metode pentru sistemul de acţionare căruia îi corespunde diagrama mişcare – faze din figura 4.197. Schema funcţională a sistemului este prezentată în figura 4.201.
În schema electrică există n relee care trebuie să anclanşeze secvenţial. Un releu odată anclanşat trebuie să se automenţină. Ca şi în cazul metodei anterioare activarea releului K, se va face numai dacă sunt îndeplinite două condiţii: un eveniment de proces (un senzor activat, o temporizare încheiată etc.) şi releul anterior Ki-1 să fi fost activat. După activare releul Ki trebuie să dezactiveze (să taie automenţinerea) releului Ki./. Ultimul releu Kn va fi condiţie de activare a primului releu K1, iar releul K1 va dezactiva releul anterior Kn.
 Fig.4.201
Fig.4.201
În cazul acestei metode în circuitul de forţă pentru comanda unui distribuitor cu memorie nu mai este necesar să existe mai multe contacte înseriate. Există posibilitatea să fie însă mai multe contacte în paralel, dacă motorul comandat trebuie să execute mai multe mişcări identice în timpul unui ciclu.
În figura 202 este prezentată schema electrică obţinută prin aplicarea acestei metode pentru exemplul considerat.
Şi în acest caz o analiză atentă a schemei electrice pune în evidenţă trei structuri de circuit:
– structura de început – figura 4.203 a;
– structura de bază – figura 4.203 b;
– structura finală – figura 4.203 c.
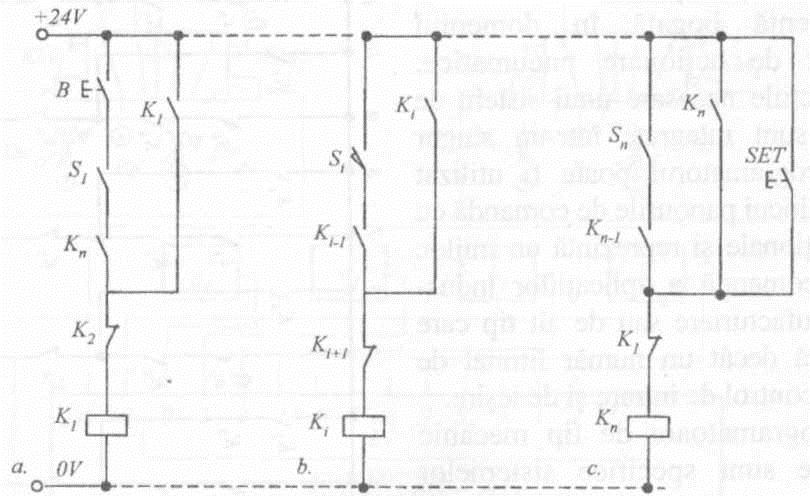 Fig.4.203
Fig.4.203
Sursa: Actionari Hidraulice si Pneumatice – Editura Universitara Bucuresti – Autor: Mihai Avram
“Echipamente si sisteme clasice si mecatronice”
În aceste structuri s-au făcut următoarele notaţii: Si, senzorul care iniţializează faza “i”, Ki releul care comandă faza “i”, B butonul care iniţializează ciclul de funcţionare şi SET un buton necesar la punerea sub tensiune a circuitului pentru activarea ultimului releu K„ (activarea acestuia este una dintre condiţiile de început ale ciclului de funcţionare).
Articole relationate:
SISTEME DE ACTIONARE PNEUMATICE – INTRODUCERE
SISTEME DE ACTIONARE PNEUMATICE – GENERATOARE DE ENERGIE PNEUMATICA
SISTEME DE ACTIONARE PNEUMATICE – TIPURI DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – RETELE DE DISTRIBUTIE A AERULUI COMPRIMAT
SISTEME DE ACTIONARE PNEUMATICE – USCATOARELE DE AER
SISTEME DE ACTIONARE PNEUMATICE – FILTRAREA IN STATIILE DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – REGLAREA DEBITULUI UNUI COMPRESOR
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – FILTRUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – UNGATORUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – REGULATORUL
SISTEME DE ACTIONARE PNEUMATICE – DISPOZITIVE DE ALIMENTARE PROGRESIVA
SISTEME DE ACTIONARE PNEUMATICE – STRUCTURI DE GRUPURI DE PREPARARE AER
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE OSCILANTE
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL PNEUMATIC CU SERTAR
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL CU SUPAPA
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE LINIARE SPECIALE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE OSCILANTE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE ROTATIVE
SISTEME DE ACTIONARE PNEUMATICE – SUPAPELE DE SENS
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE PENTRU CONTROLUL SI REGLAREA PRESIUNII
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – BUTOANE SI LIMITATOARE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – INTERFATA
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – ELEMENTE LOGICE PNEUMATICE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – TEMPORIZATOARE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – RELEE DE COMUTATIE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – RELEE DE TIMP
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – CAPETE DE VIDARE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – PRESOSTATE
PROIECTAREA UNUI SISTEM DE ACTIONARE
PROIECTAREA UNUI SISTEM DE ACTIONARE – SISTEME OMOGENE – REGLAREA VITEZEI
PROIECTAREA UNUI SISTEM DE ACTIONARE – SISTEME OMOGENE – EXEMPLE DE CIRCUITE PNEUMATICE
PROIECTAREA UNUI SISTEM DE ACTIONARE – METODE DE PROIECTARE A SCHEMELOR FUNCTIONALE
SISTEME DE ACTIONARE ELECTRO-PNEUMATICE
Alte articole:
TOTUL DESPRE DISTRIBUITOARE – INTRODUCERE
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 2/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 3/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 4/2 SI 4/3
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/3
TOTUL DESPRE DISTRIBUITOARE – COMENZILE DISTRIBUITOARELOR
TOTUL DESPRE DISTRIBUITOARE – ELECTRODISTRIBUITOARELE
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – DIMENSIONAREA CILINDRILOR PNEUMATICI
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – CILINDRII PNEUMATICI
Introducere in pneumatica – partea 1
Introducere in pneumatica -partea 2
Link-uri utile:
Cilindru patrat standard SI ISO15552 (original ISO6431)
Cilindrii pneumatici rotunzi ISO6432 seria MI
Cilindri pneumatici compacti ACQ
Amortizoare de soc seria ACA reglabile
Cilindri patrati ISO6431-ISO15552 seria SE
Distribuitoare actionate pneumatic 5/2 5/3 Seria 4A200
Distribuitoare pneumatice comanda electrica 3/2 seria 3V200