SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – SENZORI
Sursa: Actionari Hidraulice si Pneumatice – Editura Universitara Bucuresti – Autor: Mihai Avram
“Echipamente si sisteme clasice si mecatronice”
Senzorii sunt elemente care transformă o mărime mecanică într-un semnal electric sau pneumatic. Rolul lor este de a furniza unităţii de comandă informaţii pe baza cărora aceasta poate să realizeze un ciclu automat de funcţionare. Este esenţial ca informaţia transmisă să fie corectă, motiv pentru care alegerea tipului de senzor folosit trebuie făcută cu discernământ. Senzorii cei mai folosiţi în sistemele de automatizare digitale sunt cei care sesizează mişcările ansamblurilor mobile din sistem (de exemplu faptul că sarcina antrenată de un cilindru a ajuns la cap de cursă) sau prezenţa unui obiect într-un anumit punct al spaţiului de lucru.
În cazul servosistemelor pneumatice (cap.5) se folosesc deopotrivă şi alte tipuri de senzori (de deplasare, de viteză, de acceleraţie, de forţă etc).
În continuare vor fi analizaţi numai senzorii specifici sistemelor de automatizare digitale.
Problema sesizării mişcării unui obiect sau a prezenţei acestuia în spaţiul de lucru poate fi rezolvată şi cu ajutorul unor limitatoare de cursă (paragraful 4.7.2).
Senzorii prezentaţi în cele ce urmează reprezintă o altă posibilitate de rezolvare a problemei. Există două familii de asemenea senzori, şi anume:
• senzori de proximitate;
• senzori de interceptare.
Senzorii de proximitate sunt prevăzuţi cu o parte sensibilă care emite un semnal; atunci când semnalul întâlneşte în calea sa un obstacol (fig.4.129 a) acesta este perturbat. Senzorul sesizează acest lucru şi modifică în consecinţă mărimea de ieşire xe. Există şi senzori, din această categorie, care sesizează prezenţa unui obiect ce se deplasează după o direcţie perpendiculară pe axa de propagare a semnalului (fig.4.129 b).
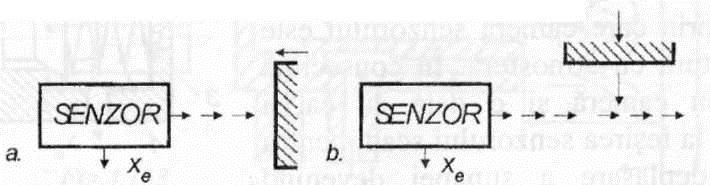
Fig.4.129
Senzorii de interceptare sunt constituiţi din două părţi, un emiţător E şi un receptor R. Dacă între emiţător şi receptor nu există un obstacol (fig.4.130 a) semnalul emis de emiţătorul E este receptat de receptorul R, şi în consecinţă la ieşirea senzorului se obţine un semnal xe adecvat. Dacă între emiţător şi receptor există un obstacol (fig.4.130 b) semnalul xe se modifică. După natura semnalului cu care lucrează senzorul există: senzori pneumatici, electronici, optici, magnetici, cu ultrasunete etc. Mulţi dintre aceşti senzori au o funcţionare analogică. Folosirea lor curentă însă este de tip digital. Pentru aceasta senzorului i se asociază un element de prag care permite obţinerea la ieşirea sa a unui semnal digital.
■ Senzori de proximitate
Există o mare varietate de asemenea senzori, care se diferenţiază prin modul de funcţionare, domeniul de operabilitate, legea de variaţie a semnalului de ieşire în funcţie de distanţa la care se află obstacolul (caracteristica senzorului), în sistemele omogene din punct de vedere energetic se folosesc senzori pneumatici. Aceşti senzori, cunoscuţi şi sub denumirea de senzori cu jet de aer, sunt capabili să sesizeze cu uşurinţă obiecte confecţionate din cele mai diverse materiale; pot fi totodată sesizate obiecte transparente. în plus, nu sunt impuse restricţii privind forma suprafeţei obiectului.
Senzorii electronici tind să fie utilizaţi pe scară tot mai largă, fiind preferaţi în situaţiile în care unitatea de comandă a sistemului este electronică. Senzorii optici sunt favorizaţi în principal datorită faptului că au o foarte bună accesibilitate datorată posibilităţii de a transmite semnale prin fibre optice, în figura 4.131 este prezentat un senzor de proximitate pneumatic. La acest senzor atât timp cât obiectul 5 nu se află în contact cu tija 2 supapa conică se află pe scaunul său datorită acţiunii arcului 4 şi a forţei dezvoltate de presiunea de alimentare Pa pe suprafaţa supapei; în această situaţie semnalul pneumatic de ieşire xe va avea o presiune egală cu presiunea Pa. Dacă obiectul atinge tija senzorului supapa se deplasează în raport cu scaunul şi se generează între supapă şi scaun o secţiune de curgere, prin care camera senzorului este pusă în legătură cu atmosfera. În consecinţă presiunea din cameră şi o dată cu ea şi presiunea de la ieşirea senzorului scad, pentru o anumită deplasare a supapei devenind apropiate de presiunea atmosferică.
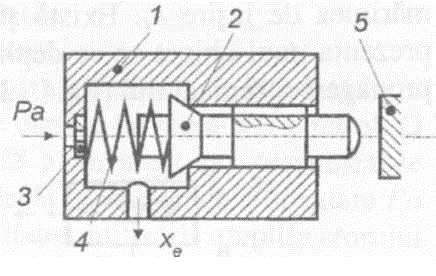
Fig.4.130

Fig.4.131
În figura 4.132 a este prezentat principial un senzor pneumatic fără contact mecanic. în fapt acest senzor este o semipunte de comandă de tip „B”, la care rezistenţa de ieşire este de tip „duză – clapetă”, clapeta fiind materializată chiar de obiectul a cărui prezenţă trebuie sesizată. Constructiv senzorul este format din două duze calibrate, de diametre cuprinse între 0,5 … 1 mm. Întotdeauna duza corespunzătoare rezistenţei Ri are diametrul mai mic decât cea corespunzătoare rezistenţei Re.

Fig.4.132
Atât timp cât obiectul a cărui prezenţă trebuie sesizată se află la o distanţă mai mare decât xlim (fig.4.132 b) semnalul de ieşire xe este egal cu presiunea atmosferică Po. Pentru x < xlim semnalul de ieşire începe să se modifice, după legea prezentată în figura 4.132 b. Expresia lui xlim este: xlim ≈de/4; pentru cazul în care se adoptă de ≈ 1 mm se obţine xlim ≈ 0,25 mm. Practic, prezenţa obiectului va fi confirmată cu certitudine dacă el se află faţă de duza de ieşire la o distanţă mai mică decât x0. Pentru cazul considerat x0 ≈ 0,1 mm. Sensibilitatea senzorului, definită ca S = dxe /dx, este ridicată, ceea ce permite sesizarea cu uşurinţă a unor deplasări de ordinul micronilor. În aceste condiţii senzorul poate fi folosit cu succes ca instrument de măsură. Această utilizare este favorizată de forma caracteristicii (fig.4.132 b), care este liniară pe cea mai mare parte a sa.
Pentru a sesiza obstacole la distanţe mari se pot folosi alte tipuri de senzori fluidici. Un asemenea senzor este prezentat principial în figura 4.133. El poate sesiza prezenţa unui obiect situat la o distanţă de 10 … 15 mm. Senzorul este format dintr-o cameră inelară externă C, prin care se face alimentarea lui la presiunea Pa şi dintr-un alezaj cilindric central Ac din care se recepţionează semnalul xe de ieşire. La alimentarea senzorului, în absenţa obstacolului, ia naştere un jet inelar în interiorul căruia se obţine o depresiune. În aceste condiţii semnalul de ieşire este o presiune mai mică decât presiunea atmosferică. Prezenţa unui obiect la distanţa x de senzor perturbă jetul şi deviază o parte din acesta către alezajul central. În această situaţie presiunea la ieşire creşte, valoarea ei fiind dependentă de distanţa x existentă între senzor şi obiect. În figura 4.133 a este prezentat simbolul acestui senzor.

Senzorii electronici folosiţi în mod uzual pot fi clasificaţi după principiul care stă la baza funcţionării lor. Caracteristicile şi performanţele acestor senzori variază de la un tip la altul. Se disting trei tipuri de asemenea senzori:
• cu curenţi Foucault;
• capacitivi;
• electromagnetici;

Fig. 4.134

Fig. 4.135
Figura 4.134 reprezintă un circuit de detecţie al unui senzor de proximitate cu curenţi Foucault. Bobina circuitului oscilant este utilizată ca element sensibil de detecţie. În absenţa corpului metalic în apropierea elementului sensibil circuitul se află în starea normală de oscilaţie. Atunci când un corp metalic se află în câmpul magnetic al bobinei sunt generaţi curenţi Foucault în interiorul corpului metalic. În consecinţă rezistenţa bobinei creşte, oscilaţiile încetează, ceea ce furnizează un semnal la ieşirea circuitului de detecţie. În figura 4.135 este prezentat simbolul unui detector de acest tip. Circuitul electronic asociat senzorilor capacitivi este practic analog celui prezentat în figura 4.134. În cazul curenţilor Foucault se utilizează un câmp magnetic de câteva zeci de kHz generat de bobină, în timp ce în cazul detectoarelor capacitive circuitul oscilant de înaltă frecvenţă, de câteva sute de kHz până la câţiva MHz, este conectat la electrozii de detecţie pornind de la care este generat un câmp electric. Dacă un obiect se apropie de acest câmp suprafaţa obiectului şi cea a electrozilor se polarizează şi generează o variaţie de capacitate care se repercutează asupra amplitudinii oscilaţiilor. Simbolul unui detector de proximitate capacitiv este prezentat în figura 4.136.
Obiectele detectabile pot fi metalice sau dielectrice. Dimensiunile geometrice ale electrozilor determină sensibilitatea senzorului şi în consecinţă este dificilă miniaturizarea acestor senzori. O aplicaţie industrială frecventă a acestui tip de senzor este detectarea apropierii etajelor în cazul ascensoarelor.

Fig. 4.136

Fig. 4.137
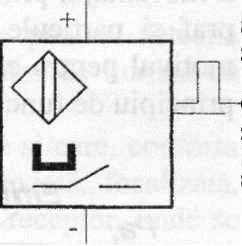
Fig. 4.138
Senzorii electromagnetici nu pot detecta decât corpuri magnetice; adeseori sunt utilizaţi pentru aceasta magneţi permanenţi. Ei se bazează pe efectul Hall, sau efectul magnetostrictiv, sau pur şi simplu pe efectul magnetic care este folosit în special în cazul releelor magnetice (relee “Reed”). Aşa cum se vede în figura 4.137 punctul de contact al releului este introdus într-un tub de sticlă conţinând un gaz inert. Marea particularitate a acestui senzor de proximitate este aceea că el nu necesită sursă de energie, putând fi activat de un magnet. Simbolul lui este prezentat în figura 4.138.
Aplicaţiile acestor senzori sunt foarte diversificate. O asemenea aplicaţie este prezentată în figura 4.139. În acest caz releul serveşte la reglarea cursei active a ansamblului mobil al unui motor liniar. În momentul în care pistonul 4, în care se află încorporat un magnet permanent 3, ajunge în dreptul releului 1 contactul acestuia 2 se închide şi se comandă revenirea ansamblului mobil. De obicei pe cămaşa motorului se montează două relee de acest tip, poziţia acestora putând fi reglată mecanic, şi prin aceasta reglându-se în fapt cursa de lucru a ansamblului mobil.
Senzori de interceptare
Aceşti senzori sesizează prezenţa unor obiecte care se interpun între cele două părţi ale senzorului: emiţător şi receptor.
În aplicaţiile practice se pot întâlni adesea senzori pneumatici, acustici, optici sau foto-electrici.
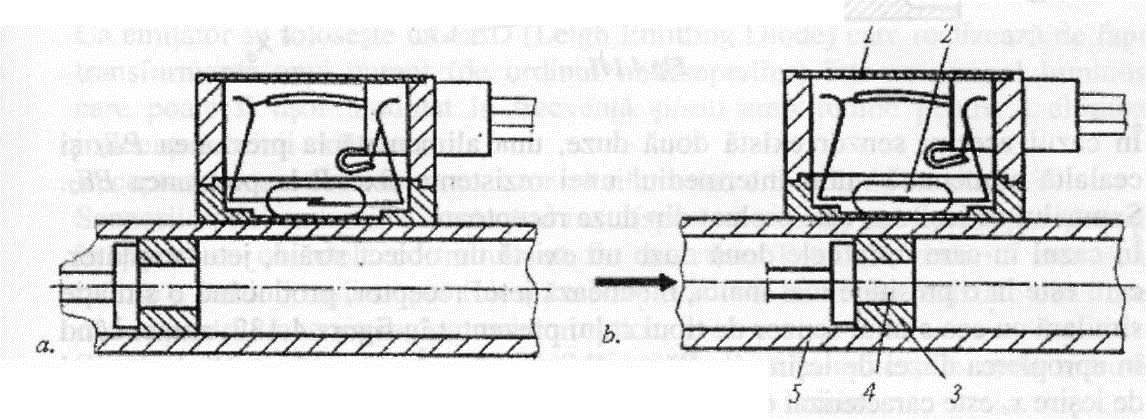
Fig.4.139
Principial, un senzor cu jet de aer (fig.4.140) este format dintr-un tub emiţător şi unul receptor. Primul este conectat în permanenţă la sursa de presiune, în timp ce cel de-al doilea captează o parte din jetul de aer. La cei mai mulţi dintre aceşti senzori jetul de aer este turbulent, deoarece condiţiile necesare realizării unei curgeri laminare (presiune mică de alimentare, raport l/d mare) sunt dificil de obţinut.
 Fig.4.140
Fig.4.140
Cât timp între emiţător şi receptor nu există un obiect străin (fig.4.140 a) la orificiul de ieşire al senzorului există semnal. Dacă între emiţător şi receptor se interpune un obiect (fig.4.140 b) semnalul receptat dispare. Dezavantajul principal al acestui tip de senzor constă în faptul că este sensibil la praf şi particule străine existente în mediul în care lucrează senzorul. Este motivul pentru care au fost concepuţi şi realizaţi senzori cu contrajet, al căror principiu de funcţionare este prezentat în figura 4.141.
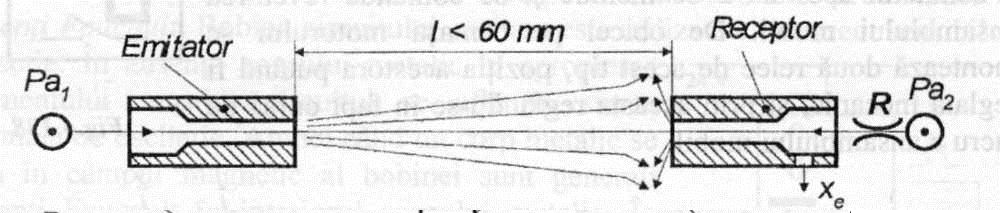
Fig.4.141
În cazul acestui senzor există două duze, una alimentată la presiunea Pa1 şi cealaltă alimentată prin intermediul unei rezistenţe fixe R la presiunea Pa2. Semnalul de ieşire xe este preluat din duza receptoare.
În cazul în care între cele două duze nu există un obiect străin, jetul emiţător, care este la o presiune mai înaltă, blochează jetul receptor, producând o situaţie similară cu cea a unui senzor de tipul celui prezentat în figura 4.132, atunci când în apropierea duzei de ieşire se află un obiect străin. În această situaţie semnalul de ieşire xe este caracterizat de o presiune înaltă (apropiată de presiunea Pa2). Atunci când între cele două duze există un obiect, jetul receptor se descarcă liber în atmosferă. În aceste condiţii se realizează o cădere mare de presiune pe rezistenţa R, şi în consecinţă semnalul de ieşire xe va avea o presiune mult redusă. Domeniul de detecţie poate fi mărit considerabil prin utilizarea senzorilor acustici. Principial un asemenea senzor, prezentat în figura 4.142, este format dintr-un emiţător acustic E, care produce o undă sonoră în domeniul ultrasonic (în jur de 50 kHz) şi un receptor pneumatic R, cu jet laminar, în cazul acestui senzor, atunci când între emiţător şi receptor nu există un obiect, unda sonoră perturbă jetul laminar, determinând în acest fel scăderea semnalului pneumatic de ieşire x.
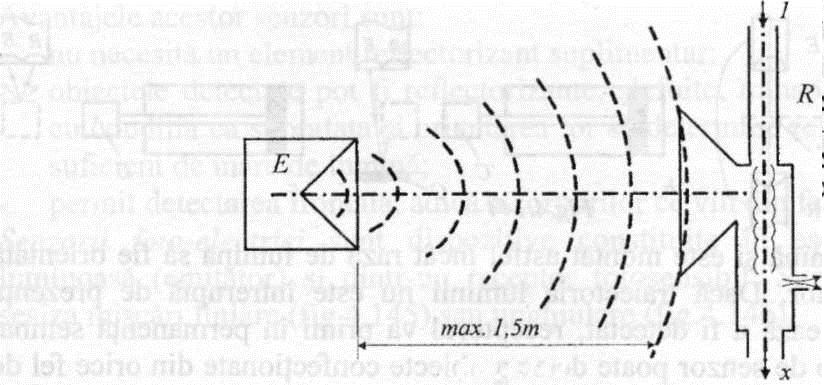
Atunci când între emiţător şi receptor există un obiect străin unda sonoră este deviată şi nu mai poate ajunge în zona jetului, acesta nu mai este perturbat şi în consecinţă la ieşirea senzorului se obţine semnal pneumatic. Senzorii optici folosesc dispozitive optice şi electronice pentru detecţia obiectelor. Un senzor de acest tip este format dintr-un emiţător de lumină cu lungime de undă definită şi un receptor.
În emiţător se află sursa care emite lumină roşie sau infraroşie şi care, conform legilor opticii, se poate propaga în linie dreaptă, poate fi deviată, focalizată, întreruptă, reflectată sau direcţionată. Lumina este captată de receptor, unde se verifică dacă semnalul este corect. Verificarea se face prin filtrare optică şi prin demodularea semnalului electric rezultat.
Ca emiţător se foloseşte un LED (Leigh Emitting Diode) care realizează de fapt transformarea unui curent (de ordinul miliamperilor) într-un semnal luminos care poate fi uşor modulat în frecvenţă şi/sau amplitudine pentru a elimina influenţa luminii externe.
Receptorul poate fi un fototranzistor cu siliciu sau o fotodiodă cu siliciu. Senzorii optici cu lumină în spectrul roşu (spectrul vizibil) pot fi uşor poziţionaţi în raport cu obiectele ce trebuie să fie detectate. Totodată, datorită atenuării reduse a luminii roşii se pot folosi cu bune rezultate cablurile realizate din fibre optice pentru transmiterea semnalelor optice.
Spectrul infraroşu, care nu este vizibil, este indicat în aplicaţiile unde trebuie acoperite distanţe mari de propagare. În plus, lumina infraroşie este mai puţin susceptibilă la interferenţe cu lumina naturală sau artificială.
În figura 4.143 este prezentat simbolul unui senzor optic. Sunt întâlnite mai multe variante de senzori optici:
– senzori cu fascicul de lumină – figura 4.144 a;
– senzori retro-reflexivi – figura 4.144 b;
– senzori de difuzie-figura 4.144 c. în cazul senzorilor cu fascicul de lumină emiţătorul şi receptorul sunt montaţi în carcase diferite.
Fig.4.143 
Fig.4.144
Emiţătorul emite un fascicul convergent de lumină şi este montat astfel încât raza de lumină să fie orientată direct spre receptor. Dacă traiectoria luminii nu este întreruptă de prezenţa obiectului ce urmează a fi detectat, receptorul va primi în permanenţă semnal luminos. Acest tip de senzor poate detecta obiecte confecţionate din orice fel de material; probleme pot să apară însă atunci când materialul obiectului ce trebuie detectat este transparent.
Avantajele utilizării unui asemenea senzor sunt:
– pot fi detectate obiecte de dimensiuni mici aflate la distanţă mare (până la 100 mm);
– poate fi utilizat în medii periculoase;
– pot fi detectate obiecte şlefuite precum şi obiecte translucide.
Ca dezavantaje se pot aminti:
– cele două module – emiţătorul şi receptorul – necesită conexiuni electrice separate;
– nu pot detecta obiecte complet transparente;
– dacă se defectează emiţătorul receptorul va evalua “prezenţă obiect”; din acest motiv în anumite aplicaţii trebuie luate măsuri suplimentare de siguranţă.
La senzorii retro-reflexivi emiţătorul şi receptorul sunt montate în aceeaşi carcasă. Emiţătorul generează un semnal luminos care este reflectat de o oglindă reflectorizantă către receptor. Un corp ce se interpune în calea fasciculului luminos va fi detectat. Sursa de lumină este şi în acest caz convergentă. Un asemenea senzor sesizează mai uşor un corp confecţionat dintr-un material transparent deoarece raza de lumină îl parcurge de două ori şi se atenuează mai mult. Şi în acest caz defectarea emiţătorului face ca receptorul să considere obiectul de detectat prezent.
Senzorii de difuzie sunt utilizaţi în aplicaţiile unde trebuie detectate corpuri cu suprafaţa lucioasă sau deschise la culoare. Şi în acest caz emiţătorul şi receptorul se găsesc montate în aceiaşi carcasă. Diferenţa faţă de senzorul precedent constă în faptul că aici emiţătorul generează un fascicul luminos divergent, caracterizat de un unghi mare de deschidere. Obiectul a cărui poziţie trebuie detectată reflectă un procent din lumina emisă, activând astfel receptorul. Distanţa de comutare depinde de capacitatea de reflectare a obiectului. Suprafaţa obiectului, densitatea materialului din care este confecţionat, forma şi culoarea obiectului, precum şi unghiul de incidenţă determină intensitatea fasciculului reflectat. Cu un asemenea tip de senzor pot fi sesizate obiecte aflate la distanţe mai mici (până la 50 mm).
Avantajele acestor senzori sunt:
– nu necesită un element reflectorizant suplimentar;
– obiectele detectate pot fi reflectorizante, şlefuite, transparente, translucide, cu condiţia ca suprafaţa şi orientarea lor să determine reflexia unei cantităţi suficient de mare de lumină;
– permit detectarea frontală, adică a corpurilor ce vin din faţă spre receptor.
Senzorii foto-electrici sunt dispozitive constituite în esenţă dintr-o sursă luminoasă (emiţător) şi dintr-un receptor fotosensibil. Sunt folosiţi pentru a sesiza mişcări liniare (fig.4.145) sau unghiulare (fig.4.146).
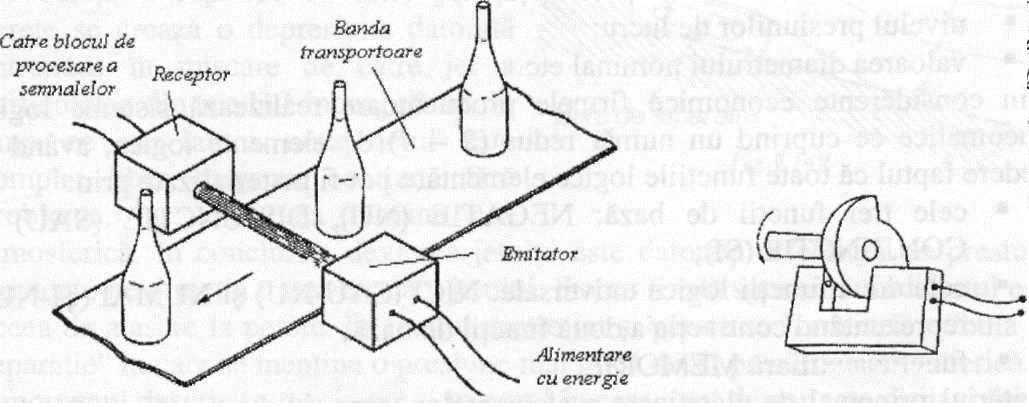
Fig. 4.145 Fig. 4.146
Astfel, atunci când se instalează un emiţător şi un receptor de o parte şi de alta a unei benzi de alimentare, dispozitivul detectează trecerea obiectelor şi furnizează un semnal către blocul de procesare a semnalelor. Celulele fotoelectrice sunt robuste, fiabile şi puţin costisitoare; în plus, ele nu au contact mecanic cu obiectele a căror prezenţă o detectează.
Autor: Prof. Dr. Ing. Mihai Avram
Articole relationate:
SISTEME DE ACTIONARE PNEUMATICE – INTRODUCERE
SISTEME DE ACTIONARE PNEUMATICE – GENERATOARE DE ENERGIE PNEUMATICA
SISTEME DE ACTIONARE PNEUMATICE – TIPURI DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – RETELE DE DISTRIBUTIE A AERULUI COMPRIMAT
SISTEME DE ACTIONARE PNEUMATICE – USCATOARELE DE AER
SISTEME DE ACTIONARE PNEUMATICE – FILTRAREA IN STATIILE DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – REGLAREA DEBITULUI UNUI COMPRESOR
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – FILTRUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – UNGATORUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – REGULATORUL
SISTEME DE ACTIONARE PNEUMATICE – DISPOZITIVE DE ALIMENTARE PROGRESIVA
SISTEME DE ACTIONARE PNEUMATICE – STRUCTURI DE GRUPURI DE PREPARARE AER
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE OSCILANTE
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL PNEUMATIC CU SERTAR
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL CU SUPAPA
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE LINIARE SPECIALE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE OSCILANTE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE ROTATIVE
SISTEME DE ACTIONARE PNEUMATICE – SUPAPELE DE SENS
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE PENTRU CONTROLUL SI REGLAREA PRESIUNII
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – BUTOANE SI LIMITATOARE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – INTERFATA
Alte articole:
TOTUL DESPRE DISTRIBUITOARE – INTRODUCERE
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 2/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 3/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 4/2 SI 4/3
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/3
TOTUL DESPRE DISTRIBUITOARE – COMENZILE DISTRIBUITOARELOR
TOTUL DESPRE DISTRIBUITOARE – ELECTRODISTRIBUITOARELE
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – DIMENSIONAREA CILINDRILOR PNEUMATICI
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – CILINDRII PNEUMATICI
Introducere in pneumatica – partea 1
Introducere in pneumatica -partea 2
Link-uri utile:
Cilindru patrat standard SI ISO15552 (original ISO6431)
Cilindrii pneumatici rotunzi ISO6432 seria MI
Cilindri pneumatici compacti ACQ
Amortizoare de soc seria ACA reglabile
Cilindri patrati ISO6431-ISO15552 seria SE
Distribuitoare actionate pneumatic 5/2 5/3 Seria 4A200
Distribuitoare pneumatice comanda electrica 3/2 seria 3V200