PROIECTAREA UNUI SISTEM DE ACTIONARE – SISTEME OMOGENE – REGLAREA VITEZEI
Sursa: Actionari Hidraulice si Pneumatice – Editura Universitara Bucuresti – Autor: Mihai Avram
“Echipamente si sisteme clasice si mecatronice”
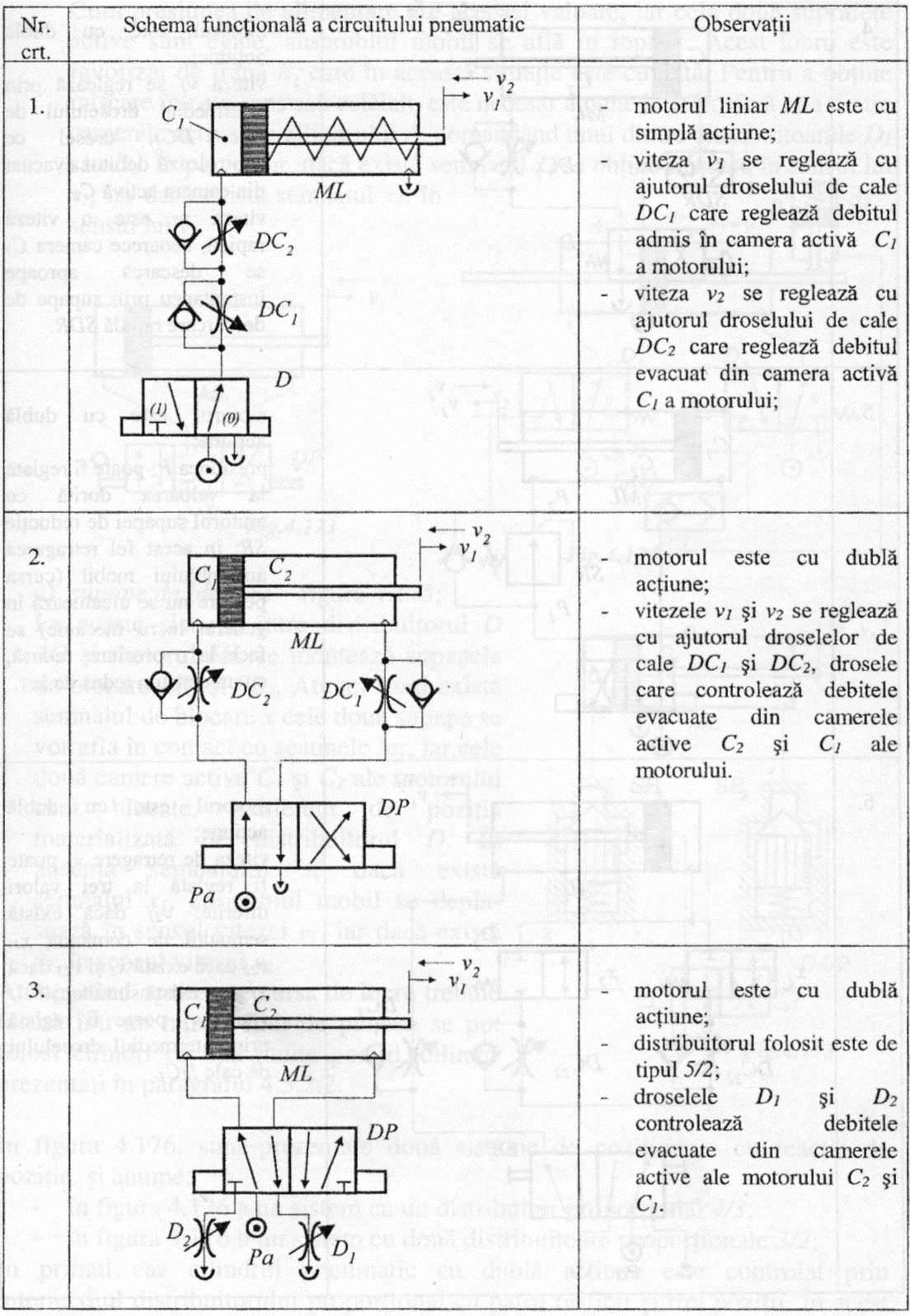
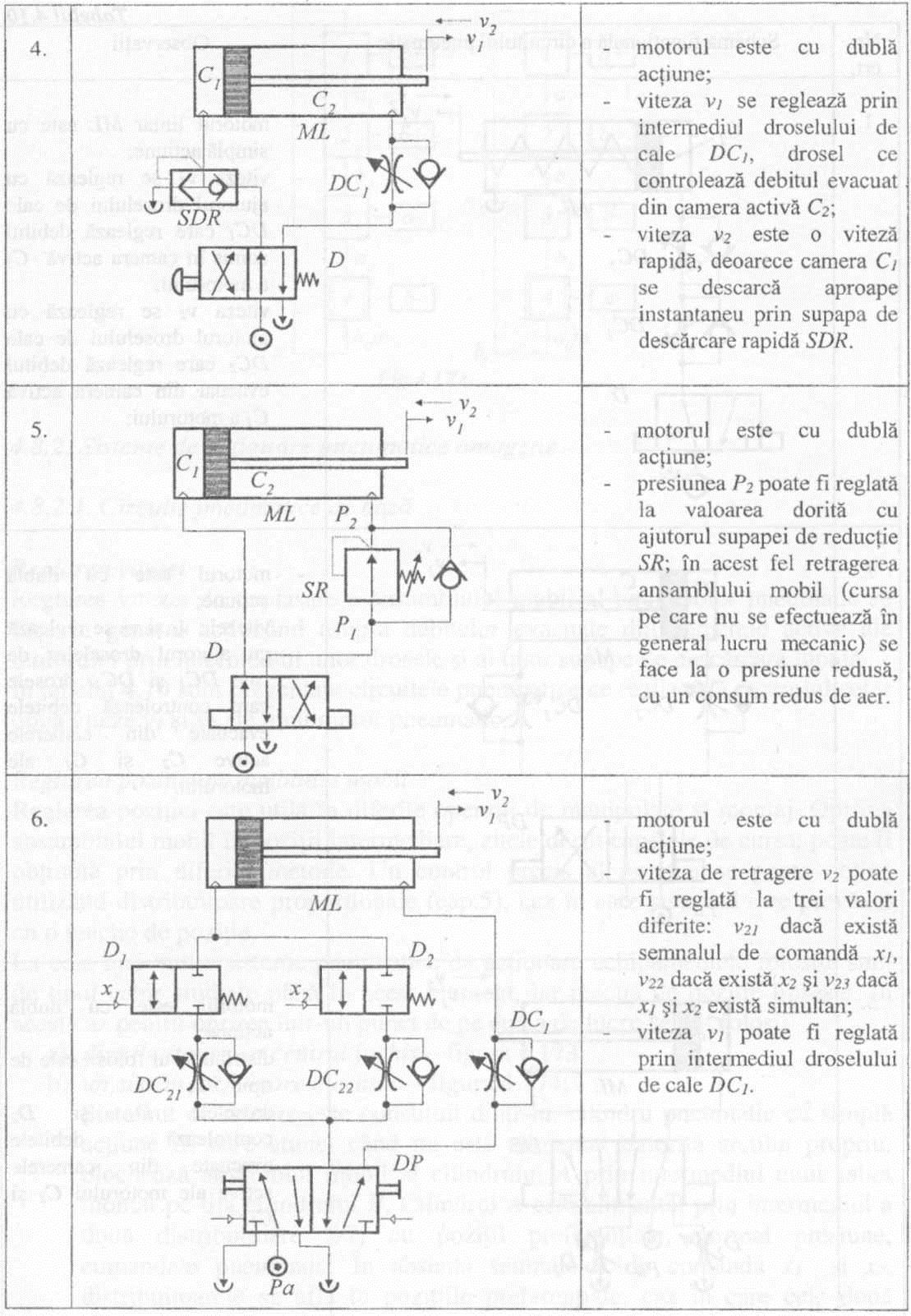
Reglarea vitezei de deplasare a ansamblului mobil al unui motor pneumatic se face în general acţionând asupra debitelor evacuate din camerele active ale motorului prin intermediul unor drosele şi al unor supape de descărcare rapidă, în tabelul 4.10 sunt prezentate circuitele pneumatice ce realizează controlul celor două viteze v1 şi v2 ale unui motor pneumatic.
Reglarea poziţiei ansamblului mobil
Reglarea poziţiei este utilă în diferite operaţii de manipulare şi montaj. Oprirea ansamblului mobil în poziţii intermediare, altele decât capetele de cursă, poate fi obţinută prin diferite metode. Un control precis al poziţiei se poate obţine utilizând distribuitoare proporţionale (cap.5), caz în care sistemul este prevăzut cu o reacţie de poziţie.
La cele mai multe sisteme pneumatice de acţionare echipamentele folosite sunt de tipul celor studiate până în acest moment, iar reacţia de poziţie lipseşte. în acest caz pentru oprirea într-un punct de pe cursa de lucru se pot folosi:
a) distribuitoare cu centrul închis – figura 4.173;
b) un sistem de frânare mecanic – figura 4.174;
Sistemul de frânare este constituit dintr-un cilindru pneumatic cu simplă acţiune B, care atunci când nu este alimentat datorită arcului propriu, blochează ansamblul mobil al cilindrului A prin intermediul unui sabot montat pe tija cilindrului B. Cilindrul A este alimentat prin intermediul a două distribuitoare 3/2, cu poziţii preferenţiale, normal presiune, comandate pneumatic. În absenţa semnalelor de comandă x1 şi x2, distribuitoarele se află în poziţiile preferenţiale, caz în care cele două camere active ale cilindrului A sunt alimentate cu presiune.

Fig. 4.172
Tabelul 4.10
Cum presiunea de alimentare are aceeaşi valoare, iar cele două suprafeţe active sunt egale, ansamblul mobil se află în repaus. Acest lucru este favorizat de frâna B, care în această situaţie este cuplată. Pentru a obţine mişcare într-un sens sau celălalt, este necesar a pune la atmosferă una dintre camerele active ale cilindrului A, comandând unul dintre distribuitoarele Di sau D2. În particular, dacă există semnalul x1 se obţine mişcare în sensul lui v1, iar dacă există semnalul x2, în sensul lui v2.
Fig.4.173
c) supape de blocare – figura 4.175; La aceste sisteme între distribuitorul D 4/2 şi motorul ML se montează supapele de blocare SBi şi SB2. Atunci când există semnalul de blocare x cele două supape se vor afla în contact cu scaunele lor, iar cele două camere active Ci şi C2 ale motorului sunt blocate, indiferent de poziţia materializată de distribuitorul D. în absenţa semnalului x, dacă există semnalul xi, ansamblul mobil se deplasează în sensul vitezei vi, iar dacă există x2, în sensul vitezei v2. Atunci când oprirea pe cursa de lucru trebuie făcută într-un număr finit de puncte, se pot folosi cilindri cu mai multe poziţii, cilindri prezentaţi în paragraful 4.5.2.2.

Fig.4.174 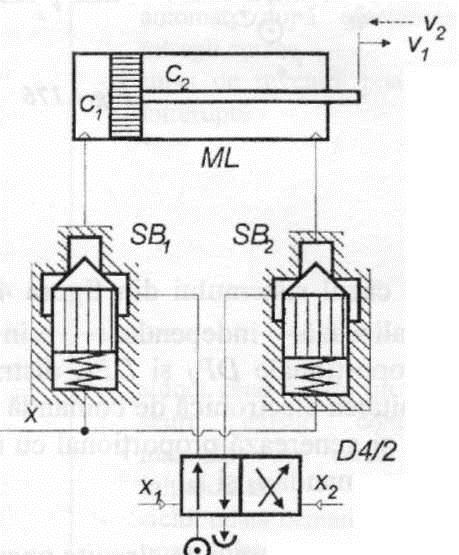
Fig.4.175
În figura 4.176. sunt prezentate două sisteme de poziţionare cu reacţie de poziţie, şi anume:
– în figura 4.176 a un sistem cu un distribuitor proporţional 4/3;
– în figura 4.176 b un sistem cu două distribuitoare proporţionale 3/2;
În primul caz cilindrul pneumatic cu dublă acţiune este controlat prin intermediul distribuitorului proporţional cu patru orificii şi trei poziţii. În acest caz cele două debite controlate de distribuitor, m1 şi m2 depind de presiunea de alimentare Pa, de presiunile din cele două camere active P1 şi P2 şi de cele două secţiuni de curgere generate la nivelul distribuitorului; dacă distribuitorul este cu sertar cilindric cu mişcare de translaţie cele două secţiuni vor fi determinate de poziţia sertarului în raport cu corpul distribuitorului. La rândul său, poziţia sertarului este determinată de presiunea de referinţă Pr şi de presiunea de control Pc. Aceasta din urmă este impusă de unitatea de comandă electronică U care compară în permanenţă semnalul programat V0 cu semnalul efectiv V, furnizat de către traductorul de poziţie Tp. Semnalul electric de ieşire din unitatea de comandă VE este transformat în semnal pneumatic de interfaţa EP.
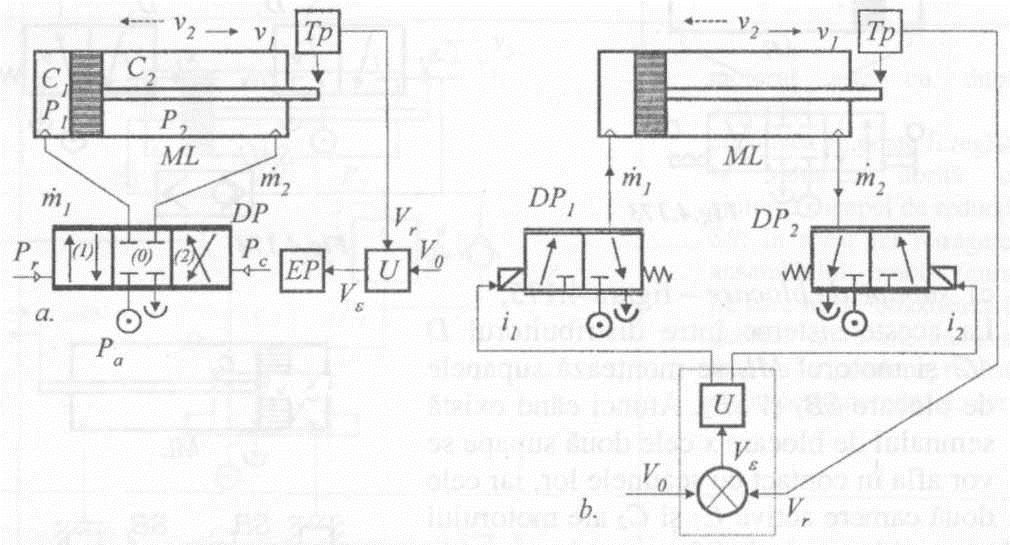
Fig. 4.176
În cazul sistemului din figura 4.176 b controlul celor două debite m1 şi m2 se realizează independent prin intermediul distribuitoarelor pneumatice proporţionale DP1 şi DP2, distribuitoare cu trei orificii şi două poziţii. Și aici unitatea electronică de comandă U compară mărimea programată V0 cu mărimea Vr şi generează proporţional cu rezultatul comparării Ve două semnale electrice de comandă i1 şi i2.
Articole relationate:
SISTEME DE ACTIONARE PNEUMATICE – INTRODUCERE
SISTEME DE ACTIONARE PNEUMATICE – GENERATOARE DE ENERGIE PNEUMATICA
SISTEME DE ACTIONARE PNEUMATICE – TIPURI DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – RETELE DE DISTRIBUTIE A AERULUI COMPRIMAT
SISTEME DE ACTIONARE PNEUMATICE – USCATOARELE DE AER
SISTEME DE ACTIONARE PNEUMATICE – FILTRAREA IN STATIILE DE COMPRESOARE
SISTEME DE ACTIONARE PNEUMATICE – REGLAREA DEBITULUI UNUI COMPRESOR
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – FILTRUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – UNGATORUL
SISTEME DE ACTIONARE PNEUMATICE – GRUPUL DE PREGATIRE AL AERULUI – REGULATORUL
SISTEME DE ACTIONARE PNEUMATICE – DISPOZITIVE DE ALIMENTARE PROGRESIVA
SISTEME DE ACTIONARE PNEUMATICE – STRUCTURI DE GRUPURI DE PREPARARE AER
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE OSCILANTE
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL PNEUMATIC CU SERTAR
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE – DISTRIBUITORUL CU SUPAPA
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE LINIARE SPECIALE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE OSCILANTE
SISTEME DE ACTIONARE PNEUMATICE – MOTOARE PNEUMATICE ROTATIVE
SISTEME DE ACTIONARE PNEUMATICE – SUPAPELE DE SENS
SISTEME DE ACTIONARE PNEUMATICE – ECHIPAMENTE PENTRU CONTROLUL SI REGLAREA PRESIUNII
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – BUTOANE SI LIMITATOARE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – INTERFATA
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – ELEMENTE LOGICE PNEUMATICE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – TEMPORIZATOARE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – RELEE DE COMUTATIE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – RELEE DE TIMP
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – CAPETE DE VIDARE
SISTEME DE ACTIONARE PNEUMATICE – COMPONENTELE SUBSISTEMULUI DE COMANDA – PRESOSTATE
PROIECTAREA UNUI SISTEM DE ACTIONARE
Alte articole:
TOTUL DESPRE DISTRIBUITOARE – INTRODUCERE
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 2/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 3/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 4/2 SI 4/3
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/2
TOTUL DESPRE DISTRIBUITOARE – TIPURI, DISTRIBUITORUL SCHEMA 5/3
TOTUL DESPRE DISTRIBUITOARE – COMENZILE DISTRIBUITOARELOR
TOTUL DESPRE DISTRIBUITOARE – ELECTRODISTRIBUITOARELE
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – DIMENSIONAREA CILINDRILOR PNEUMATICI
STRUCTURA SISTEMELOR AUTOMATE PNEUMATICE – CILINDRII PNEUMATICI
Introducere in pneumatica – partea 1
Introducere in pneumatica -partea 2
Link-uri utile:
Cilindru patrat standard SI ISO15552 (original ISO6431)
Cilindrii pneumatici rotunzi ISO6432 seria MI
Cilindri pneumatici compacti ACQ
Amortizoare de soc seria ACA reglabile
Cilindri patrati ISO6431-ISO15552 seria SE
Distribuitoare actionate pneumatic 5/2 5/3 Seria 4A200
Distribuitoare pneumatice comanda electrica 3/2 seria 3V200