CAPITOLUL 1 – PREZENTARE GENERALA – STRUCTURA UNUI SISTEM PNEUMATIC
Structura unui sistem pneumatic
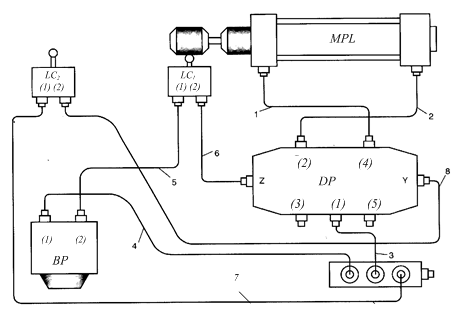
În figura 2 este prezentat, spre exemplificare, un sistem de acţionare pneumatic simplu (cu un motor). Acest sistem are în componenţa sa următoarele echipamente:
- generatorul de energie GE, aici un compresor, care generează energia pneumatică necesară sistemului pneumatic;
Observaţie: când se dispune de o reţea de aer comprimat compresorul nu este necesar; în acest caz energia necesară este preluată de la această reţea prin simpla cuplare a sistemului la unul din posturile de lucru ale reţelei;
- grupul de pregătire a aerului GPA, care realizează filtrarea, reglarea presiunii şi ungerea aerului.
Observaţie: acest grup nu trebuie să lipsească deoarece el asigură pentru mediul de lucru condiţiile necesare unei bune funcţionări. Structura lui poate fi însă modificată în funcţie de aplicaţia concretă.
 Figura 2.
Figura 2.
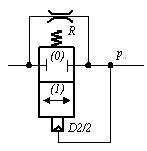
- elementele de reglare şi control ERC, care îndeplinesc următoarele funcţii:
– dirijează fluidul sub presiune, controlând astfel sensul de mişcare al sarcinii antrenate de către motor şi uneori oprirea acesteia (distribuitorul pneumatic DP);
– reglează debitele la valorile cerute de motor (şi prin aceasta vitezele de mişcare a sarcinii (droselele de cale DC1 şi DC2);
Observaţie: în structura acestui bloc pot exista şi alte echipamente ce pot realiza funcţii cum sunt: controlul şi reglarea presiunii, controlul sensului de curgere. Aceste echipamente pot fi comandate manual, mecanic, pneumatic sau electric.
- motorul pneumatic MP, care transformă energia pneumatică de intrare în lucru mecanic util.
În practică există o mare diversitate de sisteme de acţionare pneumatice. Totuşi, se poate vorbi despre o structură comună (figura 3), care pe lângă echipamentele deja prezentate, ce formează sistemul de acţionare propriu-zis SA*, mai poate conţine subsistemul de comandă SC, blocul de senzori S şi elementele de intrare EI.
Subsistemul de comandă SC este format din unitatea de comandă UC şi blocul electronic BE.
În ceea ce priveşte unitatea de comandă aceasta poate fi materializată de:
– dispozitive electronice (calculator personal, automat programabil, microcontroler)
– relee electromagnetice
– elemente logice pneumatice
Opţiunea pentru o variantă sau alta se realizează în funcţie de complexitatea sistemului şi de destinaţia acestuia.
Sistemele deosebit de complexe, întâlnite cu precădere în activitatea de cercetare, în condiţii de laborator, atunci când se urmăreşte testarea unui model experimental, pot fi conduse cu ajutorul unui calculator personal.
Cele mai multe sisteme industriale sunt conduse cu ajutorul unui automat programabil, care pe baza unor programe concepute de utilizator comandă şi reglează aplicaţia, vizualizează starea procesului, semnalizează anumite defecţiuni, comunică cu alte automate programabile sau cu alte structuri de control prin reţele standardizate.
 Figura 3
Figura 3
Tot mai multe aplicaţii au subsistemul de comandă structurat în jurul unui microcontroler. Acesta reprezintă astăzi o soluţie eficientă pentru controlul unui sistem pneumatic, asigurând totodată un preţ redus al acestuia.
Blocul electronic are rolul de a adapta semnalele de comandă furnizate de unitatea de comandă la nivelul celor cerute de sistemul de acţionare, precum şi semnalele furnizate de blocul de senzori astfel încât acestea să fie utile unităţii de comandă. În anumite situaţii acest bloc poate realiza şi funcţii suplimentare, cum ar fi: protecţia sistemului, afişarea şi setarea anumitor parametri funcţionali etc.
Releele electromagnetice reprezintă un mijloc tradiţional pentru construcţia circuitului cablat de control în cazul sistemelor de acţionare simple.
Elementele logice pneumatice se folosesc în sistemele de mici dimensiuni, când se doreşte obţinerea unor sisteme pur pneumatice din motive de ambianţă (pericol de explozie, de incendiu, umiditate etc.) sau din motive de preţ de cost.
Blocul de senzori S reuneşte senzorii şi traductoarele necesare bunei funcţionări a sistemului. Pe baza informaţilor furnizate de acest bloc unităţii de comandă aceasta ia decizii în timp real, ce urmăresc evoluţia sistemului, în ansamblul său, după un program prestabilit.
Uzual, într-un sistem pneumatic se pot întâlni traductoare şi senzori pentru:
– detectarea unui obiect din spaţiul de lucru: proximitate, interceptare;
– mărimi mecanice: poziţie, deplasare, viteză, acceleraţie, forţă, moment etc.
– mărimi specifice mediului fluid de lucru: presiune, diferenţă de presiune, debit, temperatură;
Elementele de intrare pot fi electrice sau pneumatice, natura lor fiind dependentă tot de tipul unităţii de comandă.
Concluzii
În cele ce urmează vor fi prezentate echipamentele pneumatice de automatizare de bază. Scopul urmărit este iniţierea în problematica sistemelor de acţionare pneumatice.
În familia echipamentelor de bază sunt cuprinse echipamentele comandate manual, mecanic, pneumatic sau electric, dar cu comandă de tipul ²totul sau nimic².
Vor fi tratate următoarele aspecte: construcţia, funcţionarea, simbolizarea şi alegerea din cataloagele firmelor producătoare a acestor echipamente.
Vor fi prezentate de asemenea şi elementele necesare comenzii acestor sisteme. Se vor face referiri la sisteme de comandă pneumatice şi electrice cu relee electromecanice.
Pentru o mai bună înţelegere în anumite situaţii echipamentele prezentate vor fi integrate în sisteme de acţionare simple.
Prof. Dr. Ing. Mihai Avram